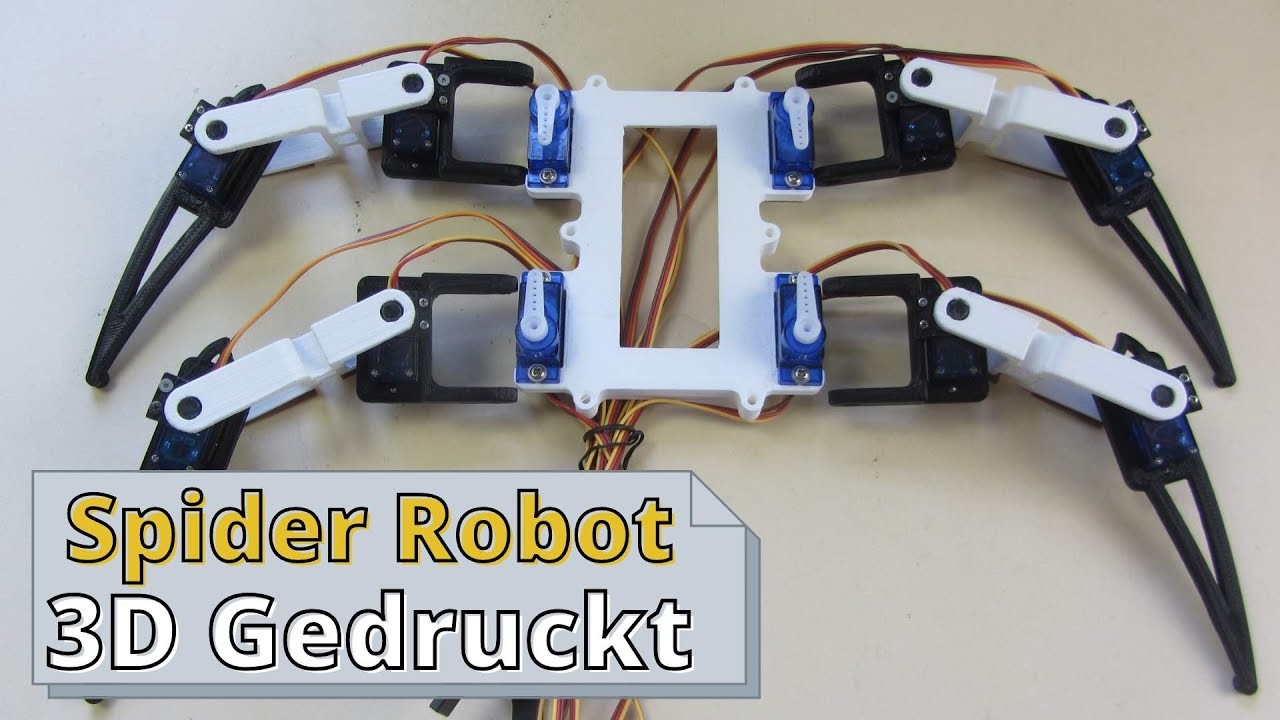
In diesem Video baue ich einen vierbeinigen Spinnenroboter, welcher aus 3D-gedruckten Teilen besteht und zwölf Servomotoren als Gelenke besitzt. Gesteuert wird der Roboter von einem Arduino Nano und einer PCA9685 Servotreiberplatine. Wenn der zweite Teil






